O texto a seguir foi publicado no posfácio do livro “Pandemia da Desinformação” (link).
Fake News e Inteligência Artificial são dois tópicos importantes que tomaram conta não apenas do imaginário mas também das manchetes e das rodas de conversa. A disseminação de conteúdos falsos pode causar danos à sociedade e, muitas vezes, o objetivo dessa disseminação é a obtenção de algum ganho, seja financeiro ou ainda alguma vantagem política. Daí emerge a questão: como abordar a veloz disseminação de informações falsas? Dentre as tecnologias atuais, a Inteligência Artificial apresenta-se como a mais viável para realizar a tarefa de separar com rapidez conteúdos fraudulentos de conteúdos verdadeiros.
O grupo de pesquisa CoDes (Combate à Desinformação e ao Discurso de Ódio), reúne vários estudantes de graduação, de mestrado e de doutorado interessados em sua temática. É um fórum para discussão, promoção de avanços científicos e, principalmente, para a formação de pesquisadores habilitados a lidar com esta desafiadora área de pesquisa, sem perder de vista aspectos fundamentais para nossa vida em sociedade, como ética e um olhar humano para os desafios atuais.
Foi desse cenário de discussão fomentado pelo grupo de pesquisa que nasceu a iniciativa deste livro que aborda várias nuances relacionadas à desinformação. Entre elas, discute-se o papel do conceito de verdade e suas distorções em peças desinformativas. Em outro momento, os autores elaboram como teorias conspiratórias são construídas e disseminadas para embaçar a nossa percepção da realidade e, ainda, destacam danos que a pseudociência pode causar ao enfraquecer o desenvolvimento científico e tecnológico.
Ao desvendar o mecanismo de propagação de notícias falsas, pode-se melhor entender como construir barreiras que nos ajudem a lidar melhor com essa enxurrada de conteúdos enganosos. Esse tópico é assunto de outro capítulo que se conecta com uma discussão sobre os impactos das notícias fraudulentas em uma miríade de setores fundamentais para a nossa vida em sociedade, em particular, na política, na economia e na saúde.
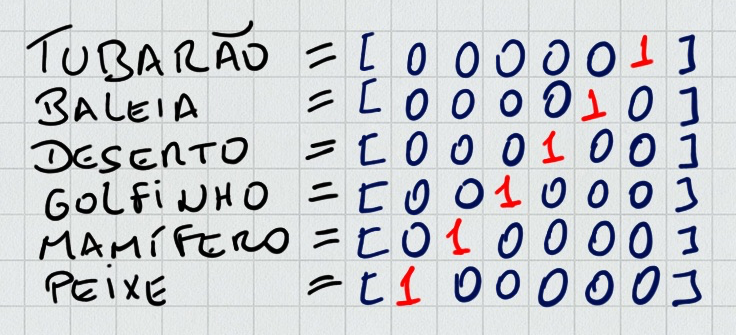
Em outra vertente, debate-se o poder dual da Inteligência Artificial. Por um lado, ela é capaz de gerar notícias fraudulentas em uma escala nunca verificada. E, por outro lado, ela é utilizada como uma alternativa automatizada para detectar notícias falsas. Ainda neste contexto, explica-se como estas ferramentas que usam Inteligência Artificial funcionam, ou seja, como elas conseguem extrair informações de textos com o propósito de predizer se uma nova sentença é uma notícia falsa ou não.
Sistemas automatizados nos brindam com a possibilidade de realizar várias ações em um curto espaço de tempo, tarefa não factível para humanos, mas tais sistemas também apresentam alguns desafios científicos a serem desbravados. Dentre eles, destaca-se a capacidade de explicar as decisões sugeridas por tais sistemas automáticos. Essa é uma importante área de pesquisa, pois tais explicações servem não apenas para argumentar e discutir em sociedade, mas também para melhorar o próprio desempenho de uma nova versão do sistema.
Estamos sempre vivendo novos tempos. Porém, a velocidade das mudanças que observamos nos últimos anos com a internet e com as redes sociais têm transformado nossa vida em sociedade de maneira inédita. O compartilhamento de conteúdos faz parte do nosso cotidiano e foi exacerbado pela simplicidade de divulgação e de propagação das plataformas de redes sociais. Destaco que um ponto crucial não diz respeito ao que fazemos nas redes sociais, mas sim o que deixamos de fazer por gastarmos tanto do nosso precioso tempo em telas.
Somos seres sociais e estamos cientes de que nossos sentimentos afetam nosso comportamento. Como destacou o neurologista e escritor, António Damásio: “Não somos máquinas de pensar que sentem, mas máquinas de sentir que pensam”. Com essa perspectiva em mente, devemos focar nossos esforços na direção propícia a fortalecer nossos laços com as pessoas, seja no universo físico ou virtual. Logo, é indispensável que estejamos diligentes para não permitirmos que a desinformação mine nossos laços de confiança.












 Esse “poder das multidões” (
Esse “poder das multidões” (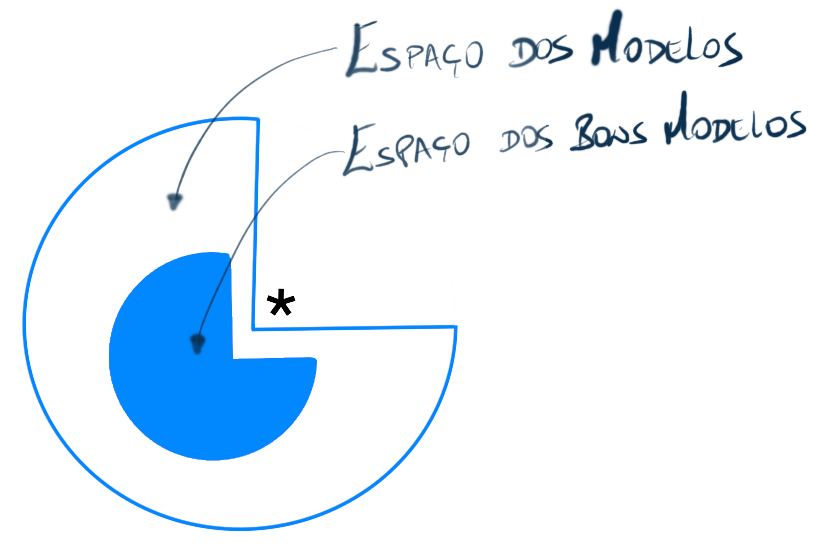 Nela, vê-se que o “esp
Nela, vê-se que o “esp